ボール型ロボットSpheroで自動運転プログラムを組もう!(その2)
サイエンストレーナーの桑子研です。
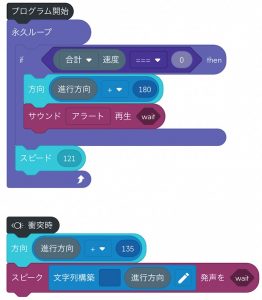
前回、Spheroを使った自動運転プログラムについて紹介しましたが、プログラミングの答えは一つではなく、複数あります。今回紹介するのは前回とは違う方法、センサーをつかって自動運転を組むというプログラムです。次のようにプログラムをしてみましょう。
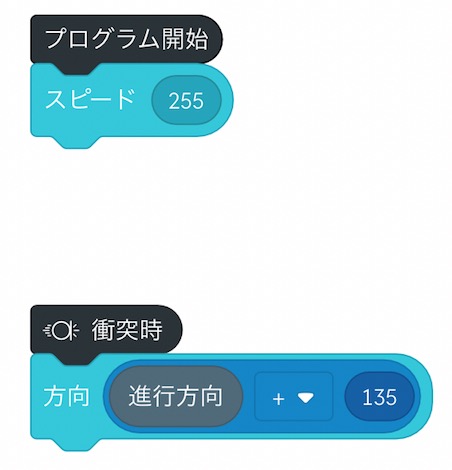
前回と違うのは衝突時の命令です。前回紹介したものと比べてみましょう。

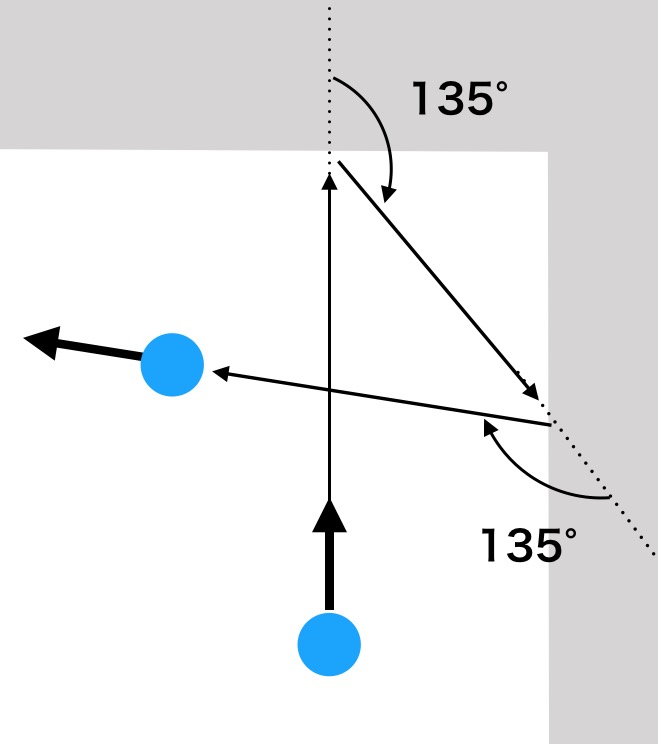
衝突時にこのプログラムの場合には、現在の方向をセンサーデータから読み取り、その方向に+135°を足すと言う方法で、衝突時に後ろに進むように命令を組んでいます。前回は方向を一度ゼロにしてから向きを再度設定しています。どちらも同じ動きをします。
ぼくはこの2つの方法について考えましたが、他にも方法があるかもしれません。もし面白い方法がわかったらぜひ教えてください。
でもこのプログラム、衝突センサーが働かない場合は止まってしまうことがあるんですね。そんなときにどうやって回避をすればいいのか、次回はその点について条件分岐をつかって考えてみたいと思います。お楽しみに!
[amazonjs asin=”B01JCD4JAW” locale=”JP” title=”Sphero SPRK+ (スパークプラス) プログラミングロボット/STEM / 【日本正規代理店品】 K001JPN”]
科学のタネを発信中!
ニュースレターを月1回配信しています。
[subscribe2]
登録はこちらから
2月のイチオシ実験!梱包材で遊ぼう!
- 静電気の時期になってきました。子供と一緒に梱包材で盛り上がろう!→ やめられなくなる!静電気実験20
 体中に梱包材をはりつけてみよう!
体中に梱包材をはりつけてみよう!
テレビ番組等・科学監修等のお知らせ
- 「月曜から夜更かし」(日本テレビ)にて科学監修・出演しました。
書籍のお知らせ
- 1/27 『見えない力と遊ぼう!電気・磁石・熱の実験』(工学社)を執筆しました。
- サクセス15 2月号にて「浸透圧」に関する科学記事を執筆しました。
- 『大人のための高校物理復習帳』(講談社)…一般向けに日常の物理について公式を元に紐解きました。特設サイトでは実験を多数紹介しています。※増刷がかかり6刷となりました(2026/02/01)
- 『きめる!共通テスト 物理基礎 改訂版』(学研)… 高校物理の参考書です。イラストを多くしてイメージが持てるように描きました。授業についていけない、物理が苦手、そんな生徒におすすめです。特設サイトはこちら。
講師等・ショー・その他お知らせ
- 2/20(金)「生徒の進学希望実現支援事業」研究授業@福井県立若狭高等学校 講師
- 3/20(金) 日本理科教育学会オンライン全国大会2026「慣性の法則の概念形成を目指した探究的な学びの実践」について発表します。B会場 第3セッション: 学習指導・教材(中学校)③ 11:20-12:20
- 7/18(土) 教員向け実験講習会「ナリカカサイエンスアカデミー」の講師をします。お会いしましょう。
- 10/10(土) サイエンスショー予定
- 各種SNS X(Twitter)/instagram/Facebook/BlueSky/Threads
Explore
- 楽しい実験…お子さんと一緒に夢中になれるイチオシの科学実験を多数紹介しています。また、高校物理の理解を深めるための動画教材も用意しました。
- 理科の教材… 理科教師をバックアップ!授業の質を高め、準備を効率化するための選りすぐりの教材を紹介しています。
- Youtube…科学実験等の動画を配信しています。
- 科学ラジオ …科学トピックをほぼ毎日配信中!AI技術を駆使して作成した「耳で楽しむ科学」をお届けします。
- 講演 …全国各地で実験講習会・サイエンスショー等を行っています。
- About …「科学のネタ帳」のコンセプトや、運営者である桑子研のプロフィール・想いをまとめています。
- お問い合わせ …実験教室のご依頼、執筆・講演の相談、科学監修等はこちらのフォームからお寄せください。